|
||
|
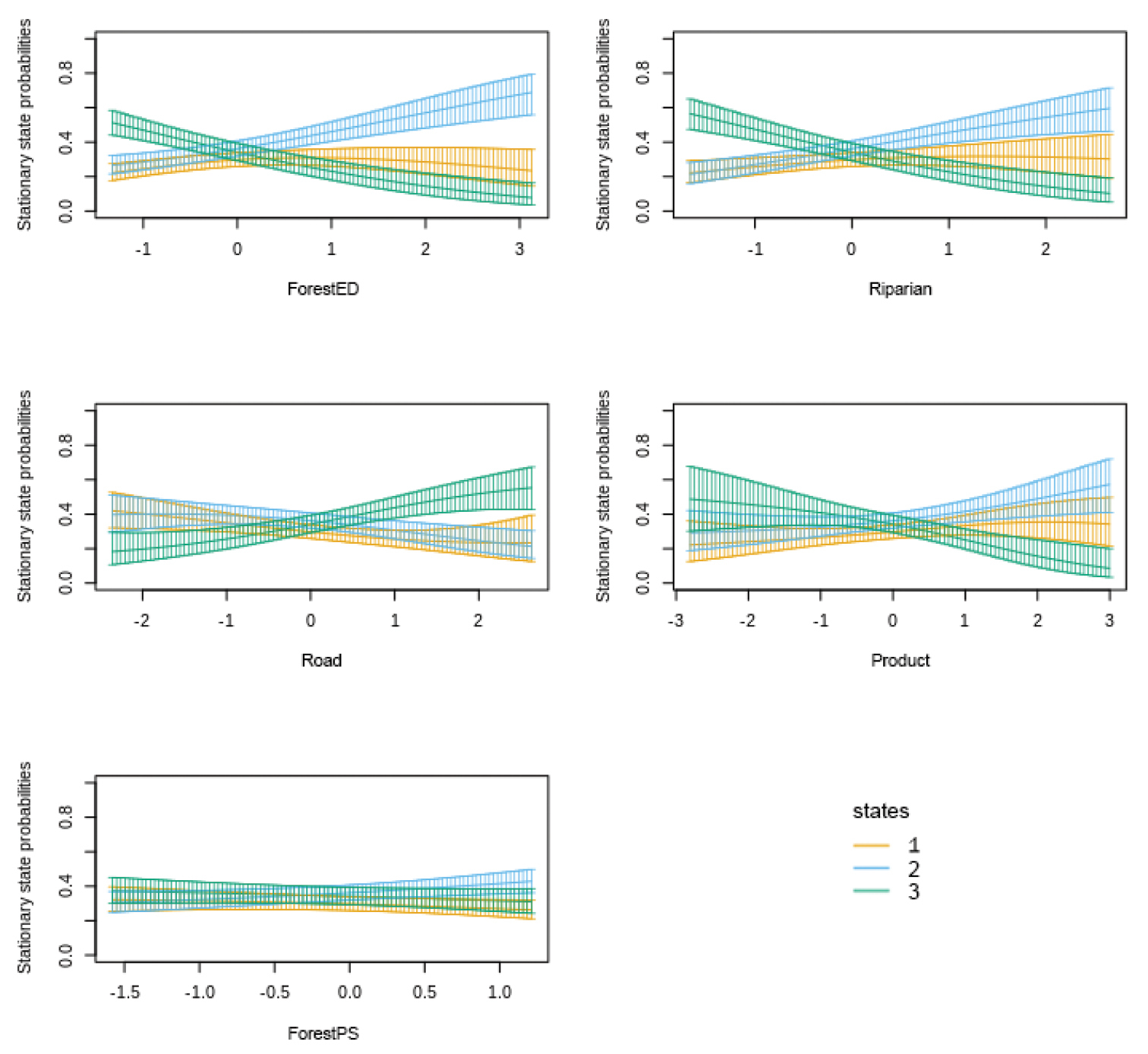
Stationary state probabilities (with 95% confidence intervals) as a function of each predictor considered in the best HMM model (from upper left to the right: ForestED, Riparian, Road, Product and ForestPS). States are: 1 = resting, 2 = foraging, 3 = travelling. |